Сверхкомпактный Автономный Робот-Автомобиль (СКАРА)
Сверхкомпактная модель автономного автомобиля, адаптированная для самостоятельного изготовления, с комплектом проектной документации.

Задача
В рамках проекта «Передовые инженерные школы» Минобрнауки России, направленного на подготовку квалифицированных инженерных кадров для высокотехнологичных отраслей экономики, Санкт-Петербургский политехнический университет Петра Великого разработал программу создания и развития Передовой инженерной школы (ПИШ) «Цифровой инжиниринг». Программа направлена на совместную работу с индустриальными партнерами в области системного цифрового инжиниринга.
В рамках мероприятий ПИШ СПбПУ по повышению квалификации, подготовке и переподготовке инженерных кадров разрабатываются не только программы обучения, но и уникальные образовательные инструменты - программные и программно-аппаратные тренажеры для имитации выполнения производственных задач в сфере передовых производственных практик.
Одним из таких тренажеров станет Сверхкомпактный Автономный Робот-Автомобиль (СКАРА) – малогабаритная модель автономного автомобиля для обучения профессиональных инженеров технологиям создания интеллектуальных систем управления для беспилотного транспорта.
Разработка адресована специалистам вузов, научно-исследовательских организаций, обучающих центров.
Решение
Разработана проектная документация и модель программно-аппаратного комплекса (как в физическом, так и в «виртуальном» воплощении):
- Конструкция модели максимально адаптирована к самостоятельному изготовлению, модификации и кастомизации специалистами вузов, научно-исследовательских организаций, обучающих центров.
- Максимально унифицирована конструкция шасси и используемые в ней элементы.
- Уменьшено число готовых/фабричных деталей. Большинство компонентов адаптированы под изготовление способами 3D-печати и лазерной резки.
Конструкционно СКАРА состоит из двух составляющих:
- Шасси с расположенными на нём исполнительными устройствами, датчиками дистанции и энкодерами, а также системой управления нижнего уровня,
- Деки с расположенной на ней управляющей аппаратурой верхнего уровня, а также в зависимости от конфигурации - лидаром, одной или двумя интеллектуальными камерами Intel Realsense, камерами кругового обзора и другими датчиками.
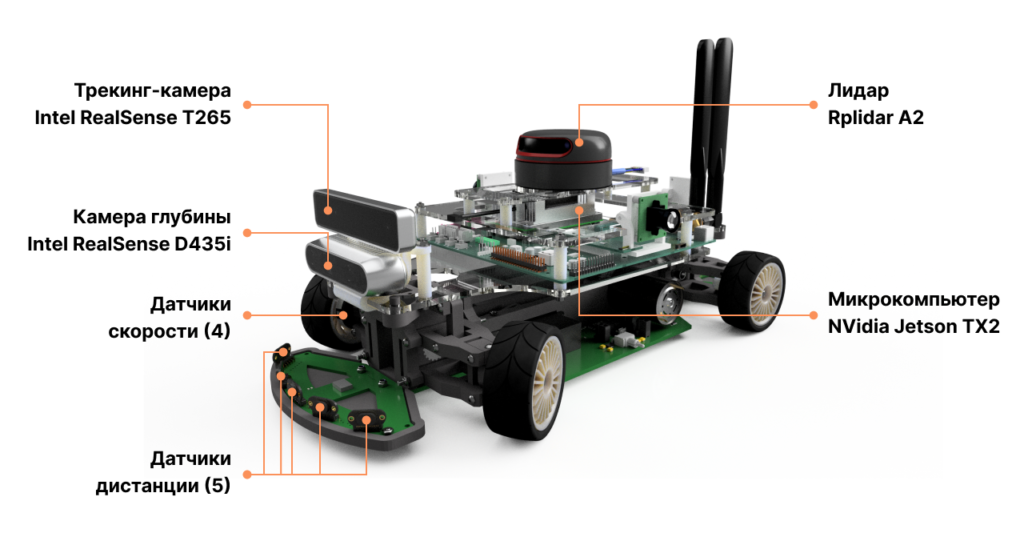
Внешний вид СКАРА (рендер)
Детали
Шасси
Шасси одновременно служит и конструкционным элементом, которое обеспечивает передвижение СКАРА, и платформой для размещения всей управляющей электроники нижнего уровня.
В рамках работы над конструкционной частью шасси преследовалась цель максимального упрощения производства и возможного ремонта устройства.
При разработке аппаратной части шасси были соблюдены следующие требования:
- Максимальная унификация конструктивных элементов для упрощения производства и возможного ремонта шасси;
- Создание максимального количества плоских элементов с одинаковой толщиной для того, чтобы элементы можно было в случае необходимости произвести двумя различными способами – либо 3D печатью, либо лазерной резкой из оргстекла или листового ABS-пластика с последующей сверловкой под крепёж;
- Масштабируемость длины шасси;
- Минимизация числа конструктивных элементов.
- Сокращение числа «покупных» элементов: большая часть конструкционных элементов должна производиться локально.
Программное обеспечение нижнего уровня выполняет функции:
- Сбор показаний датчиков дистанции;
- Сбор показаний энкодеров;
- Управление двигателем постоянного тока;
- Управление сервоприводом;
- Выполнение аварийного останова в случае обнаружения датчиками дистанции препятствий, угрожающих безопасному функционированию СКАРА;
- Получение данных о заряде аккумулятора СКАРА;
- Обмен данными с верхним уровнем СКАРА.
ДЕКА
В базовой конфигурации позволяет:
- Строить карты местности и ориентироваться на них (например, при помощи SLAM-метода и считывания одометрии);
- Выполнять поиск кратчайшего пути следования к точке на карте;
- Объезжать динамические и статические препятствия.
А также:
- Распознавать различные знаки и атрибуты дорожной обстановки – разметку, дорожные знаки, пешеходов, другой транспорт, и реагировать на них;
- Строить обзорные изображения (surround view, bird view, orbital view и прочие).
Несущая печатная плата
На основной печатной плате расположены:
- Контроллер STM32 со встроенной системой управления и обработки данных с датчиков дистанции;
- Подсистема питания, обеспечивающая необходимые потребители системы управления: контроллер STM32, датчики, двигатель постоянного тока, сервопривод поворота колёс;
- Подсистема связи, обеспечивающая связь с системой управления верхнего уровня посредством преобразователя UART-USB;
- Подсистема управления двигателем постоянного тока (драйвер двигателя).
Шасси
Для основы двигающейся части прототипа было взято стандартное шасси радиоуправляемой модели. В процессе разработки оно было серьезно модернизировано для улучшения маневренности и уменьшения люфтов в отдельных узлах конструкции шасси.
Данные габаритные размеры являются наиболее универсальными. С одной стороны, они позволяют разместить «на борту» модели весь набор оборудования, который необходим для выполнения поставленных задач. С другой стороны, благодаря небольшим габаритам модели ее удобно переносить и эксплуатировать типовых замкнутых пространствах – небольших комнатах, коридорах и т.п.
Технологии
| Языки программирования и фреймворки | C++, Python, ROS, Cartographer, C, CubeMx |
| OS | Linux |
| CVS | Git (Gitlab) |
| IDE | CLion, stm32cubeide, vscode |