ПО для фотовидеофиксации нарушений Правил дорожного движения
Программное обеспечение для измерительного комплекса с функциями контроля дорожного движения и фотофиксации участников дорожного движения, пересекающих контролируемый участок дороги на нерегулируемых дорожных переходах, с синхронным измерением времени фотографирования, скорости движения и местоположения в зоне контроля.
Задача
Современные разработки в области автоматизации транспортной системы в основном направлены на обеспечение безопасности участников дорожного движения. Особенно – пешеходов, как самой многочисленной и самой уязвимой группы. В основном разработки направлены на контроль соблюдения правил, который сейчас осуществляют с помощью автоматической фото- и видеофиксации - радарных, лазерных, фото- и видеокамер.
Одна из ведущих компаний-производителей технических средств для этих целей обратилась к специалистам лаборатории с задачей разработать программное обеспечение стационарного измерительного комплекса для фиксации нарушений правил дорожного движения водителями.
ПО, предназначенное для контроля ситуации на нерегулируемых пешеходных переходах, должно было самостоятельно определять случаи правонарушений, а также:
- Выполнять фото- и видеофиксацию участников дорожного движения, пересекающих контролируемый участок дороги;
- Синхронно измерять и фиксировать время фотографирования;
- Синхронно измерять и фиксировать скорость движения транспортных средств и пешеходов, а также их местоположение в зоне контроля.
- Формировать необходимую доказательную базу о правонарушениях со стороны транспортного средства.
Решение
Разработано ПО, с помощью которого измерительный комплекс фиксирует следующие события в обозреваемой зоне:
- Непредоставление преимущества в движении пешеходам;
- Разворот на пешеходном переходе
- Нарушение установленного скоростного режима
- Движение по обочине
- Движение по полосе для маршрутных транспортных средств
- Выезд на полосу встречного движения
- Выезд на трамвайные пути встречного направления
- Движение во встречном направлении по дороге с односторонним движением
- Проезд без совершения административного правонарушения
- Надежная доказательная база: в случае определения правонарушения система формирует протокол - фотоколлаж и видеозаписи с указанием траектории движения, скорости транспортного средства и времени события.
- Улучшение качества фотоматериалов за счет использования алгоритмов предварительной обработки видеокадров и алгоритмов постобработки изображений.
- Настройка шаблонов материалов нарушений под нужды заказчика.
- Автоматический режим: материалы формируются без участия оператора, необходимость ручной отбраковки кадров сведена к нулю.
- Видеотрансляция ситуации на дороге в реальном времени.
- Удаленный мониторинг по протоколам Zabbix и SNMP.
- Поиск транспортных средств, находящихся в розыске, с использованием системы фильтров.
Детали
В рамках создания программного обеспечения были проведены следующие работы:
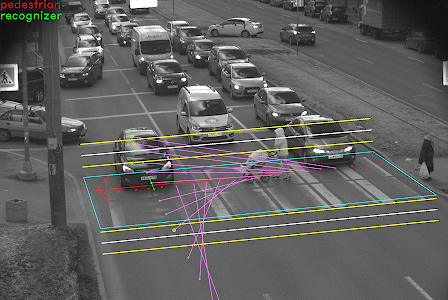
- Разработка алгоритма детектирования пешеходов и транспортных средств, построение траектории их движения;
- Разработка алгоритма распознавания нарушений в соответствии с ГОСТ Р 57144-216;
- Разработка испытательного стенда и проведение поверки в соответствии с методикой поверки;
- Разработка алгоритмов резервного архивирования данных о нарушениях;
- Разработка алгоритмов определения параметров расположения измерительного комплекса на местности по изображению с камеры и данным радара;
- Разработка приложения просмотра данных избыточного документирования, формируемых измерительным комплексом.
Реализованы алгоритмы обнаружения следующих видов нарушений ПДД:
- Статья 12.9. КОАП РФ. Превышение установленной скорости движения
- Статья 12.14. КОАП РФ Нарушение правил маневрирования (разворот на пешеходном переходе);
- Статья 12.15. КОАП РФ. Нарушение правил расположения транспортного средства на проезжей части дороги, встречного разъезда или обгона:
- Ч.1. Движение по обочине;
- Ч.3. Выезд на полосу встречного движения. Выезд на трамвайные пути встречного направления.
- Статья 12.16 КОАП РФ. Несоблюдение требований, предписанных дорожными знаками или разметкой проезжей части дороги:
- Ч.3. Движение во встречном направлении по дороге с односторонним движением.
- Статья 12.17 КОАП РФ. Непредоставление преимущества в движении маршрутному транспортному средству или транспортному средству с включенными специальными световыми и звуковыми сигналами:
- Ч.1.1. Движение транспортных средств по полосе для маршрутных транспортных средств.
- Статья 12.18 КОАП РФ. Непредоставление преимущества в движении пешеходам;
На текущий момент ПО установлено и успешно работает в измерительных комплексах компании-заказчика.
Характеристики измерительного комплекса:
- ГОСТ Р 57144-2016, ГОСТ Р 57145-2016.
- Метрологическое подтверждение измеряемых параметров.
- Установка на существующих объектах дорожной инфраструктуры.
- Диапазон измерений скорости движения транспортного средства – от 2 до 350 км/ч.
- Диапазон измерений расстояния от до движущегося транспортного средства – от 10 до 100 м.
- Диапазон измерений углов на ТС от +20° до -20°.
- Рабочая частота радиолокационного излучения – 24,15 ± 0,1 ГГц.
- Условия эксплуатации: температура окружающей среды от -40 до +50ºС; относительная влажность воздуха до 98 %.
- Степень защиты по ГОСТ 14254-2015 - IP65.
Технические преимущества
- Измерение скорости транспортного средства в диапазоне от 2 до 250 км/ч с погрешностью не более +/-2 км/ч при скоростях до 100 км/ч и не более +/-2 % при скоростях свыше 100 км/ч.
- Определение времени события и присвоение его материалу с точностью не более +/-3 мс.
- Анализ траектории движения транспортных средств и пешеходов.
- Сплошной контроль до трех полос движения с фотофиксацией всех транспортных средств.
Технологии
| Библиотеки и фреймворки: | Qt, OpenCV, Boost, Zlib, Live555, ffmpeg, libx264, libjpeg |
| Web интерфейс | Javascript/AJAX/JQuery, Bootstrap, WebSockets, HTML5, CSS |
| OS | Windows embedded |
| Архитектуры | x64 |
| CVS | Git (Gitlab) |
| СУБД/БД | MySQL |
| Беспроводные технологии | Wi-Fi |
РИД
Публикации
Ключевые исполнители
- Руководитель группы разработки: А.С. Одоевский
- Системный архитектор: Д.С. Баринов
- Ведущий разработчик: Н.А. Абрамов
- Математик-алгоритмист: Я.В. Хуторной
- Разработчики: О.В. Козырев, А.О. Беляевский, М.С. Баринов